この節ではベクトル場の一般化である「テンソル場」を導入し,それをどのように表すかを考察します。
ベクトル場
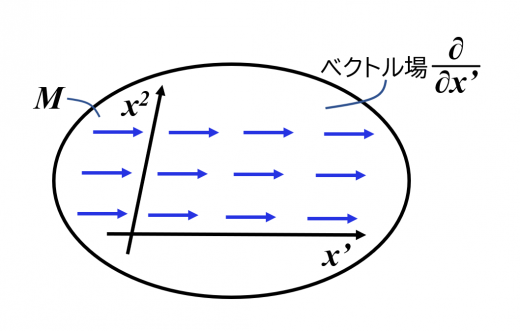
まずはわかりやすいベクトル場について考えてみましょう。平面や空間上の各点にベクトルを配置したものをベクトル場というのでした。あるいはもっと一般に曲線や曲面,多様体といった空間の上のベクトル場というものも考えられます。
定義
空間(正確には C ∞ C^\infty C ∞ M M M p p p X p X_p X p X X X M M M
ここでベクトル X p X_p X p M M M X p X_p X p R 2 \mathbb{R}^2 R 2 R 3 \mathbb{R}^3 R 3 点 p p p X p X_p X p ことが有用です。
例えば球面 S 2 S^2 S 2 p p p X p X_p X p p p p T p S 2 T_pS^2 T p S 2
空間 M M M p p p M M M T p M T_pM T p M M M M p p p M M M X X X p ∈ M p \in M p ∈ M T p M T_pM T p M X p X_p X p
座標によるベクトル場の表示
空間 M M M ( x 1 , … , x n ) (x^1, \dots , x^n) ( x 1 , … , x n ) X X X
まずは座標 ( x 1 , … , x n ) (x^1, \dots , x^n) ( x 1 , … , x n )
事実 1
空間 M M M ( x 1 , … , x n ) (x^1, \dots , x^n) ( x 1 , … , x n ) n n n ∂ ∂ x 1 , … , ∂ ∂ x n
\frac{\partial}{\partial x^1 }, \dots , \frac{\partial}{\partial x^n}
∂ x 1 ∂ , … , ∂ x n ∂
各点 p p p n n n ( ∂ ∂ x 1 ) p , … , ( ∂ ∂ x n ) p ∈ T p M
\left(\frac{\partial}{\partial x^1}\right)_p, \dots , \left(\frac{\partial}{\partial x^n}\right)_p \in T_pM
( ∂ x 1 ∂ ) p , … , ( ∂ x n ∂ ) p ∈ T p M T p M T_pM T p M
(偏微分と同じ記号を使う理由については省略。)
厳密にどう作るかは省略しますが,だいたい下図のように,座標 x i x^i x i ∂ ∂ x i \frac{\partial}{\partial x^i} ∂ x i ∂
さて,各点 p p p ( ∂ ∂ x 1 ) p , … , ( ∂ ∂ x n ) p ∈ T p M
\left(\frac{\partial}{\partial x^1} \right)_p, \dots , \left(\frac{\partial}{\partial x^n} \right)_p \in T_pM
( ∂ x 1 ∂ ) p , … , ( ∂ x n ∂ ) p ∈ T p M T p M T_pM T p M X X X p p p X p X_p X p a 1 ( p ) , … a n ( p ) a_1(p), \dots a_n(p) a 1 ( p ) , … a n ( p )
X p = ∑ i = 1 n a i ( p ) ( ∂ ∂ x i ) p
X_p = \sum_{i = 1}^n a_i(p) \left(\frac{\partial}{\partial x^i} \right)_p
X p = i = 1 ∑ n a i ( p ) ( ∂ x i ∂ ) p 成分表示 )。a 1 ( p ) , … a n ( p ) a_1(p), \dots a_n(p) a 1 ( p ) , … a n ( p ) p p p X = ∑ i = 1 n a i ∂ ∂ x i
X = \sum_{i = 1}^n a_i \frac{\partial}{\partial x^i}
X = i = 1 ∑ n a i ∂ x i ∂
これによって,座標 ( x 1 , … , x n ) (x^1, \dots , x^n) ( x 1 , … , x n ) X X X p p p ( a 1 ( p ) , … a n ( p ) ) (a_1(p), \dots a_n(p)) ( a 1 ( p ) , … a n ( p ))
では別の座標 u 1 , … , u n u^1, \dots , u^n u 1 , … , u n X = ∑ i = 1 n b i ∂ ∂ u i
X = \sum_{i = 1}^n b_i \frac{\partial}{\partial u^i}
X = i = 1 ∑ n b i ∂ u i ∂
と表したときに,関数の組 ( a 1 , … a n ) (a_1, \dots a_n) ( a 1 , … a n ) ( b 1 , … , b n ) (b_1, \dots, b_n) ( b 1 , … , b n )
これを調べるには接空間 T p M T_pM T p M ( ∂ ∂ x 1 ) p , … , ( ∂ ∂ x n ) p
\left(\frac{\partial}{\partial x^1} \right)_p, \dots , \left(\frac{\partial}{\partial x^n} \right)_p
( ∂ x 1 ∂ ) p , … , ( ∂ x n ∂ ) p ( ∂ ∂ u 1 ) p , … , ( ∂ ∂ u n ) p
\left(\frac{\partial}{\partial u^1} \right)_p, \dots , \left(\frac{\partial}{\partial u^n} \right)_p
( ∂ u 1 ∂ ) p , … , ( ∂ u n ∂ ) p
事実 2
ベクトル空間 T p M T_pM T p M
( ∂ ∂ u j ) p = ∑ i = 1 n ( ∂ x i ∂ u j ( p ) ) ( ∂ ∂ x i ) p
\left(\frac{\partial}{\partial u^j} \right)_p = \sum_{i = 1}^n \left( \frac{\partial x^i}{\partial u^j}(p) \right) \left(\frac{\partial}{\partial x^i} \right)_p
( ∂ u j ∂ ) p = i = 1 ∑ n ( ∂ u j ∂ x i ( p ) ) ( ∂ x i ∂ ) p
が成り立つ。( p p p ∂ ∂ u j = ∑ i = 1 n ∂ x i ∂ u j ∂ ∂ x i
\frac{\partial}{\partial u^j} = \sum_{i = 1}^n \frac{\partial x^i}{\partial u^j} \frac{\partial}{\partial x^i}
∂ u j ∂ = i = 1 ∑ n ∂ u j ∂ x i ∂ x i ∂
ここで ∂ x i ∂ u j ( p ) \frac{\partial x^i}{\partial u^j}(p) ∂ u j ∂ x i ( p ) x i x^i x i u 1 , … u n u^1, \dots u^n u 1 , … u n u j u^j u j p p p →偏微分の意味と計算例・応用 )
例
平面の座標として標準座標 ( x , y ) (x, y) ( x , y ) ( r , θ ) (r, \theta) ( r , θ ) x = r cos θ y = r sin θ
\begin{aligned}
x &= r \cos \theta \\
y &= r \sin \theta
\end{aligned}
x y = r cos θ = r sin θ ( ∂ x ∂ r ∂ x ∂ θ ∂ y ∂ r ∂ y ∂ θ ) = ( cos θ − r sin θ sin θ r cos θ )
\left(\begin{array}{cc}
\frac{\partial x}{\partial r} & \frac{\partial x}{\partial \theta}\\
\frac{\partial y}{\partial r} & \frac{\partial y}{\partial \theta}
\end{array}\right)
=
\left(\begin{array}{cc}
\cos \theta & -r \sin \theta\\
\sin \theta & r \cos \theta
\end{array}\right)
( ∂ r ∂ x ∂ r ∂ y ∂ θ ∂ x ∂ θ ∂ y ) = ( cos θ sin θ − r sin θ r cos θ ) ∂ ∂ r = cos θ ∂ ∂ x + sin θ ∂ ∂ y ∂ ∂ θ = − r sin θ ∂ ∂ x + r cos θ ∂ ∂ y
\begin{aligned}
\frac{\partial}{\partial r} &= \cos \theta \frac{\partial}{\partial x} + \sin \theta \frac{\partial}{\partial y} \\
\frac{\partial}{\partial \theta} &= -r \sin \theta \frac{\partial}{\partial x} + r \cos \theta \frac{\partial}{\partial y}
\end{aligned}
∂ r ∂ ∂ θ ∂ = cos θ ∂ x ∂ + sin θ ∂ y ∂ = − r sin θ ∂ x ∂ + r cos θ ∂ y ∂
これを使えば ( a 1 , … a n ) (a_1, \dots a_n) ( a 1 , … a n ) ( b 1 , … , b n ) (b_1, \dots, b_n) ( b 1 , … , b n )
X p = ∑ j = 1 n b j ( p ) ( ∂ ∂ u j ) p = ∑ j = 1 n b j ( p ) ∑ i = 1 n ( ∂ x i ∂ u j ( p ) ) ( ∂ ∂ x i ) p
\begin{aligned}
X_p &= \sum_{j = 1}^n b_j(p) \left(\frac{\partial}{\partial u^j} \right)_p \\
&=\sum_{j = 1}^n b_j(p) \sum_{i = 1}^n \left( \frac{\partial x^i}{\partial u^j}(p) \right) \left(\frac{\partial}{\partial x^i} \right)_p
\end{aligned}
X p = j = 1 ∑ n b j ( p ) ( ∂ u j ∂ ) p = j = 1 ∑ n b j ( p ) i = 1 ∑ n ( ∂ u j ∂ x i ( p ) ) ( ∂ x i ∂ ) p X p = ∑ i = 1 n a i ( p ) ( ∂ ∂ x i ) p
X_p = \sum_{i = 1}^n a_i(p) \left(\frac{\partial}{\partial x^i} \right)_p
X p = i = 1 ∑ n a i ( p ) ( ∂ x i ∂ ) p ( ∂ ∂ x i ) p \left(\frac{\partial}{\partial x^i} \right)_p ( ∂ x i ∂ ) p
a i ( p ) = ∑ j = 1 n b j ( p ) ∂ x i ∂ u j ( p )
a_i(p) = \sum_{j = 1}^n b_j(p) \frac{\partial x^i}{\partial u^j}(p)
a i ( p ) = j = 1 ∑ n b j ( p ) ∂ u j ∂ x i ( p ) a i = ∑ j = 1 n b j ∂ x i ∂ u j
a_i = \sum_{j = 1}^n b_j \frac{\partial x^i}{\partial u^j}
a i = j = 1 ∑ n b j ∂ u j ∂ x i 物理的なテンソルの定義と例 )
物理との関係は後述します。
テンソル場と成分表示
テンソル場とは,空間 M M M p p p 以下 T p ∗ M T^*_pM T p ∗ M T p M T_pM T p M
定義
空間 M M M p p p T p M T_pM T p M T p M ⊗ ⋯ ⊗ T p M ⏟ r 個 ⊗ T p ∗ M ⊗ ⋯ ⊗ T p ∗ M ⏟ s 個
\underbrace{T_pM \otimes \cdots \otimes T_pM}_{r \text{個}} \otimes \underbrace{T^*_pM \otimes \cdots \otimes T^*_pM}_{s \text{個}}
r 個 T p M ⊗ ⋯ ⊗ T p M ⊗ s 個 T p ∗ M ⊗ ⋯ ⊗ T p ∗ M ( r , s ) (r, s) ( r , s ) η p \eta_p η p η \eta η M M M ( r , s ) (r, s) ( r , s )
定義はこのようにベクトル場とほとんど同じです。
テンソル積における基底の議論とベクトル場の成分表示を組み合わせて,テンソル場の成分表示を考察しましょう。まず記号を導入します。
定義
M M M ( x 1 , … , x n ) (x^1, \dots, x^n) ( x 1 , … , x n ) T p M T_pM T p M ( ∂ ∂ x 1 ) p , … , ( ∂ ∂ x n ) p
\left(\frac{\partial}{\partial x^1} \right)_p, \dots , \left(\frac{\partial}{\partial x^n} \right)_p
( ∂ x 1 ∂ ) p , … , ( ∂ x n ∂ ) p T p ∗ M T^*_pM T p ∗ M ( d x 1 ) p , … , ( d x n ) p
(dx^1)_p, \dots ,(dx^n)_p
( d x 1 ) p , … , ( d x n ) p
これを使うと,
T p M ⊗ ⋯ ⊗ T p M ⏟ r 個 ⊗ T p ∗ M ⊗ ⋯ ⊗ T p ∗ M ⏟ s 個
\underbrace{T_pM \otimes \cdots \otimes T_pM}_{r \text{個}} \otimes \underbrace{T^*_pM \otimes \cdots \otimes T^*_pM}_{s \text{個}}
r 個 T p M ⊗ ⋯ ⊗ T p M ⊗ s 個 T p ∗ M ⊗ ⋯ ⊗ T p ∗ M ( ∂ ∂ x i 1 ) p ⊗ ⋯ ⊗ ( ∂ ∂ x i r ) p ⊗ ( d x j 1 ) p ⊗ ⋯ ⊗ ( d x j s ) p \left(\frac{\partial}{\partial x^{i_1}} \right)_p \otimes \cdots \otimes \left(\frac{\partial}{\partial x^{i_r}} \right)_p \otimes (dx^{j_1})_p \otimes \cdots \otimes (dx^{j_s})_p ( ∂ x i 1 ∂ ) p ⊗ ⋯ ⊗ ( ∂ x i r ∂ ) p ⊗ ( d x j 1 ) p ⊗ ⋯ ⊗ ( d x j s ) p
という元たちをとることができるので,( r , s ) (r, s) ( r , s ) η \eta η p p p η p \eta_p η p η p = ∑ i 1 , … , i r , j 1 , … , j s a j 1 , … , j s i 1 , … , i r ( p ) ( ∂ ∂ x i 1 ) p ⊗ ⋯ ⊗ ( ∂ ∂ x i r ) p ⊗ ( d x j 1 ) p ⊗ ⋯ ⊗ ( d x j s ) p
\eta_p = \sum_{i_1, \dots, i_r, j_1, \dots, j_s} a^{i_1, \dots, i_r}_{j_1, \dots, j_s}(p) \left(\frac{\partial}{\partial x^{i_1}} \right)_p \otimes \cdots \otimes \left(\frac{\partial}{\partial x^{i_r}} \right)_p \\
\otimes (dx^{j_1})_p \otimes \cdots \otimes (dx^{j_s})_p
η p = i 1 , … , i r , j 1 , … , j s ∑ a j 1 , … , j s i 1 , … , i r ( p ) ( ∂ x i 1 ∂ ) p ⊗ ⋯ ⊗ ( ∂ x i r ∂ ) p ⊗ ( d x j 1 ) p ⊗ ⋯ ⊗ ( d x j s ) p ただのベクトルの成分表示とおなじです。 )
ベクトル場の成分表示と同様に,a j 1 , … , j s i 1 , … , i r ( p ) a^{i_1, \dots, i_r}_{j_1, \dots, j_s}(p) a j 1 , … , j s i 1 , … , i r ( p ) p p p p p p η = ∑ i 1 , … , i r , j 1 , … , j s a j 1 , … , j s i 1 , … , i r ∂ ∂ x i 1 ⊗ ⋯ ⊗ ∂ ∂ x i r ⊗ d x j 1 ⊗ ⋯ ⊗ d x j s
\eta = \sum_{i_1, \dots, i_r, j_1, \dots, j_s} a^{i_1, \dots, i_r}_{j_1, \dots, j_s} \frac{\partial}{\partial x^{i_1}} \otimes \cdots \otimes \frac{\partial}{\partial x^{i_r}} \\
\otimes dx^{j_1} \otimes \cdots \otimes dx^{j_s}
η = i 1 , … , i r , j 1 , … , j s ∑ a j 1 , … , j s i 1 , … , i r ∂ x i 1 ∂ ⊗ ⋯ ⊗ ∂ x i r ∂ ⊗ d x j 1 ⊗ ⋯ ⊗ d x j s
とも書きます。
これが座標を使ったテンソル場の成分表示です。( a j 1 , … , j s i 1 , … , i r a^{i_1, \dots, i_r}_{j_1, \dots, j_s} a j 1 , … , j s i 1 , … , i r
テンソル場と座標変換
M M M u 1 , … , u n u^1, \dots, u^n u 1 , … , u n ( r , s ) (r, s) ( r , s ) η \eta η
まずは次の事実を使います。
定理
ベクトル空間 T p ∗ M T^*_pM T p ∗ M
( d u j ) p = ∑ i = 1 n ( ∂ u j ∂ x i ( p ) ) ( d x i ) p
(du^j)_p = \sum_{i = 1}^n \left( \frac{\partial u^j}{\partial x^i}(p) \right) (dx^i)_p
( d u j ) p = i = 1 ∑ n ( ∂ x i ∂ u j ( p ) ) ( d x i ) p
が成り立つ。( p p p d u j = ∑ i = 1 n ∂ u j ∂ x i d x i
du^j = \sum_{i = 1}^n \frac{\partial u^j}{\partial x^i} dx^i
d u j = i = 1 ∑ n ∂ x i ∂ u j d x i
証明
上で見た双対基底の変換法則より,行列
( ∂ x i ∂ u j ( p ) ) i j
\left( \frac{\partial x^i}{\partial u^j}(p) \right)_{ij}
( ∂ u j ∂ x i ( p ) ) ij ( ∂ u i ∂ x j ( p ) ) i j
\left( \frac{\partial u^i}{\partial x^j}(p) \right)_{ij}
( ∂ x j ∂ u i ( p ) ) ij ∑ j = 1 n ( ∂ x i ∂ u j ( p ) ) ( ∂ u j ∂ x k ( p ) )
\sum_{j = 1}^n \left( \frac{\partial x^i}{\partial u^j}(p) \right) \left( \frac{\partial u^j}{\partial x^k}(p) \right)
j = 1 ∑ n ( ∂ u j ∂ x i ( p ) ) ( ∂ x k ∂ u j ( p ) ) i = k i = k i = k 1 1 1 0 0 0 合成関数の微分公式 によって
∑ j = 1 n ( ∂ x i ∂ u j ( p ) ) ( ∂ u j ∂ x k ( p ) ) = ∂ x i ∂ x k ( p )
\sum_{j = 1}^n \left( \frac{\partial x^i}{\partial u^j}(p) \right) \left( \frac{\partial u^j}{\partial x^k}(p) \right) = \frac{\partial x^i}{\partial x^k}(p)
j = 1 ∑ n ( ∂ u j ∂ x i ( p ) ) ( ∂ x k ∂ u j ( p ) ) = ∂ x k ∂ x i ( p )
これをテンソルの基底変換の式に当てはめれば, η \eta η
η = ∑ k 1 , … , k r , l 1 , … , l s b l 1 , … , l s k 1 , … , k r ∂ ∂ u k 1 ⊗ ⋯ ⊗ ∂ ∂ u k r ⊗ d u l 1 ⊗ ⋯ ⊗ d u l s
\eta = \sum_{k_1, \dots, k_r, l_1, \dots, l_s} b^{k_1, \dots, k_r}_{l_1, \dots, l_s} \frac{\partial}{\partial u^{k_1}} \otimes \cdots \otimes \frac{\partial}{\partial u^{k_r}} \\
\otimes du^{l_1} \otimes \cdots \otimes du^{l_s}
η = k 1 , … , k r , l 1 , … , l s ∑ b l 1 , … , l s k 1 , … , k r ∂ u k 1 ∂ ⊗ ⋯ ⊗ ∂ u k r ∂ ⊗ d u l 1 ⊗ ⋯ ⊗ d u l s
とすると,
∂ ∂ u k = ∑ i = 1 n ∂ x i ∂ u k ∂ ∂ x i
\frac{\partial}{\partial u^k} = \sum_{i = 1}^n \frac{\partial x^i}{\partial u^k} \frac{\partial}{\partial x^i}
∂ u k ∂ = i = 1 ∑ n ∂ u k ∂ x i ∂ x i ∂
と
d u l = ∑ j = 1 n ∂ u l ∂ x j d x j
du^l = \sum_{j = 1}^n \frac{\partial u^l}{\partial x^j} dx^j
d u l = j = 1 ∑ n ∂ x j ∂ u l d x j
を代入して
η = ∑ k 1 , … , k r , l 1 , … , l s b l 1 , … , l s k 1 , … , k r ∂ ∂ u k 1 ⊗ ⋯ ⊗ ∂ ∂ u k r ⊗ d u l 1 ⊗ ⋯ ⊗ d u l s = ∑ k 1 , … , k r , l 1 , … , l s b l 1 , … , l s k 1 , … , k r ∑ i 1 , … , i r , j 1 , … , j s ∂ x i 1 ∂ u k 1 ⋯ ∂ x i r ∂ u k r ⋅ ∂ u l 1 ∂ x j 1 ⋯ ∂ u l r ∂ x j r ∂ ∂ x i 1 ⊗ ⋯ ⊗ ∂ ∂ x i r ⊗ d x j 1 ⊗ ⋯ ⊗ d x j s
\begin{aligned}
\eta &= \sum_{k_1, \dots, k_r, l_1, \dots, l_s} b^{k_1, \dots, k_r}_{l_1, \dots, l_s} \frac{\partial}{\partial u^{k_1}} \otimes \cdots \otimes \frac{\partial}{\partial u^{k_r}}
\otimes du^{l_1} \otimes \cdots \otimes du^{l_s}\\
&= \sum_{k_1, \dots, k_r, l_1, \dots, l_s} b^{k_1, \dots, k_r}_{l_1, \dots, l_s} \sum_{i_1, \dots, i_r, j_1, \dots, j_s} \frac{\partial x^{i_1}}{\partial u^{k_1}} \cdots \frac{\partial x^{i_r}}{\partial u^{k_r}} \cdot
\frac{\partial u^{l_1}}{\partial x^{j_1}} \cdots \frac{\partial u^{l_r}}{\partial x^{j_r}} \\
&\frac{\partial}{\partial x^{i_1}} \otimes \cdots \otimes \frac{\partial}{\partial x^{i_r}} \otimes dx^{j_1} \otimes \cdots \otimes dx^{j_s}
\end{aligned}
η = k 1 , … , k r , l 1 , … , l s ∑ b l 1 , … , l s k 1 , … , k r ∂ u k 1 ∂ ⊗ ⋯ ⊗ ∂ u k r ∂ ⊗ d u l 1 ⊗ ⋯ ⊗ d u l s = k 1 , … , k r , l 1 , … , l s ∑ b l 1 , … , l s k 1 , … , k r i 1 , … , i r , j 1 , … , j s ∑ ∂ u k 1 ∂ x i 1 ⋯ ∂ u k r ∂ x i r ⋅ ∂ x j 1 ∂ u l 1 ⋯ ∂ x j r ∂ u l r ∂ x i 1 ∂ ⊗ ⋯ ⊗ ∂ x i r ∂ ⊗ d x j 1 ⊗ ⋯ ⊗ d x j s
となるから,
η = ∑ i 1 , … , i r , j 1 , … , j s a j 1 , … , j s i 1 , … , i r ∂ ∂ x i 1 ⊗ ⋯ ⊗ ∂ ∂ x i r ⊗ d x j 1 ⊗ ⋯ ⊗ d x j s
\eta = \sum_{i_1, \dots, i_r, j_1, \dots, j_s} a^{i_1, \dots, i_r}_{j_1, \dots, j_s} \frac{\partial}{\partial x^{i_1}} \otimes \cdots \otimes \frac{\partial}{\partial x^{i_r}} \\
\otimes dx^{j_1} \otimes \cdots \otimes dx^{j_s}
η = i 1 , … , i r , j 1 , … , j s ∑ a j 1 , … , j s i 1 , … , i r ∂ x i 1 ∂ ⊗ ⋯ ⊗ ∂ x i r ∂ ⊗ d x j 1 ⊗ ⋯ ⊗ d x j s
a j 1 , … , j s i 1 , … , i r = ∑ k 1 , … , k r , l 1 , … , l s b l 1 , … , l s k 1 , … , k r ∂ x i 1 ∂ u k 1 ⋯ ∂ x i r ∂ u k r ⋅ ∂ u l 1 ∂ x j 1 ⋯ ∂ u l r ∂ x j r
a^{i_1, \dots, i_r}_{j_1, \dots, j_s} = \sum_{k_1, \dots, k_r, l_1, \dots, l_s} b^{k_1, \dots, k_r}_{l_1, \dots, l_s} \frac{\partial x^{i_1}}{\partial u^{k_1}} \cdots \frac{\partial x^{i_r}}{\partial u^{k_r}} \cdot
\frac{\partial u^{l_1}}{\partial x^{j_1}} \cdots \frac{\partial u^{l_r}}{\partial x^{j_r}}
a j 1 , … , j s i 1 , … , i r = k 1 , … , k r , l 1 , … , l s ∑ b l 1 , … , l s k 1 , … , k r ∂ u k 1 ∂ x i 1 ⋯ ∂ u k r ∂ x i r ⋅ ∂ x j 1 ∂ u l 1 ⋯ ∂ x j r ∂ u l r
となります。アインシュタインの縮約記法を使うと
a j 1 , … , j s i 1 , … , i r = b l 1 , … , l s k 1 , … , k r ∂ x i 1 ∂ u k 1 ⋯ ∂ x i r ∂ u k r ⋅ ∂ u l 1 ∂ x j 1 ⋯ ∂ u l r ∂ x j r
a^{i_1, \dots, i_r}_{j_1, \dots, j_s} = b^{k_1, \dots, k_r}_{l_1, \dots, l_s} \frac{\partial x^{i_1}}{\partial u^{k_1}} \cdots \frac{\partial x^{i_r}}{\partial u^{k_r}} \cdot
\frac{\partial u^{l_1}}{\partial x^{j_1}} \cdots \frac{\partial u^{l_r}}{\partial x^{j_r}}
a j 1 , … , j s i 1 , … , i r = b l 1 , … , l s k 1 , … , k r ∂ u k 1 ∂ x i 1 ⋯ ∂ u k r ∂ x i r ⋅ ∂ x j 1 ∂ u l 1 ⋯ ∂ x j r ∂ u l r
とも書けます(→アインシュタインの縮約記法 )。これがテンソル場の座標による成分表示の座標変換です。
まとめ
M M M ( r , s ) (r, s) ( r , s ) η \eta η M M M p p p T p M ⊗ ⋯ ⊗ T p M ⏟ r 個 ⊗ T p ∗ M ⊗ ⋯ ⊗ T p ∗ M ⏟ s 個
\underbrace{T_pM \otimes \cdots \otimes T_pM}_{r \text{個}} \otimes \underbrace{T^*_pM \otimes \cdots \otimes T^*_pM}_{s \text{個}}
r 個 T p M ⊗ ⋯ ⊗ T p M ⊗ s 個 T p ∗ M ⊗ ⋯ ⊗ T p ∗ M η p \eta_p η p
( r , s ) (r, s) ( r , s ) η \eta η M M M ( x 1 , … , x n ) (x^1, \dots, x^n) ( x 1 , … , x n )
η = ∑ i 1 , … , i r , j 1 , … , j s a j 1 , … , j s i 1 , … , i r ∂ ∂ x i 1 ⊗ ⋯ ⊗ ∂ ∂ x i r ⊗ d x j 1 ⊗ ⋯ ⊗ d x j s
\eta = \sum_{i_1, \dots, i_r, j_1, \dots, j_s} a^{i_1, \dots, i_r}_{j_1, \dots, j_s} \frac{\partial}{\partial x^{i_1}} \otimes \cdots \otimes \frac{\partial}{\partial x^{i_r}}
\otimes dx^{j_1} \otimes \cdots \otimes dx^{j_s}
η = i 1 , … , i r , j 1 , … , j s ∑ a j 1 , … , j s i 1 , … , i r ∂ x i 1 ∂ ⊗ ⋯ ⊗ ∂ x i r ∂ ⊗ d x j 1 ⊗ ⋯ ⊗ d x j s 関数の組 { a j 1 , … , j s i 1 , … , i r } \{a^{i_1, \dots, i_r}_{j_1, \dots, j_s}\} { a j 1 , … , j s i 1 , … , i r }
座標をとりかえたときの η \eta η
定理
M M M ( x 1 , … , x n ) (x^1, \dots , x^n) ( x 1 , … , x n ) ( u 1 , … , u n ) (u^1, \dots, u^n) ( u 1 , … , u n ) M M M ( r , s ) (r, s) ( r , s ) η \eta η η = ∑ i 1 , … , i r , j 1 , … , j s a j 1 , … , j s i 1 , … , i r ∂ ∂ x i 1 ⊗ ⋯ ⊗ ∂ ∂ x i r ⊗ d x j 1 ⊗ ⋯ ⊗ d x j s = ∑ k 1 , … , k r , l 1 , … , l s b l 1 , … , l s k 1 , … , k r ∂ ∂ u k 1 ⊗ ⋯ ⊗ ∂ ∂ u k r ⊗ d u l 1 ⊗ ⋯ ⊗ d u l s
\begin{aligned}
\eta &= \sum_{i_1, \dots, i_r, j_1, \dots, j_s} a^{i_1, \dots, i_r}_{j_1, \dots, j_s} \frac{\partial}{\partial x^{i_1}} \otimes \cdots \otimes \frac{\partial}{\partial x^{i_r}}
\otimes dx^{j_1} \otimes \cdots \otimes dx^{j_s}\\
&= \sum_{k_1, \dots, k_r, l_1, \dots, l_s} b^{k_1, \dots, k_r}_{l_1, \dots, l_s} \frac{\partial}{\partial u^{k_1}} \otimes \cdots \otimes \frac{\partial}{\partial u^{k_r}}
\otimes du^{l_1} \otimes \cdots \otimes du^{l_s}
\end{aligned}
η = i 1 , … , i r , j 1 , … , j s ∑ a j 1 , … , j s i 1 , … , i r ∂ x i 1 ∂ ⊗ ⋯ ⊗ ∂ x i r ∂ ⊗ d x j 1 ⊗ ⋯ ⊗ d x j s = k 1 , … , k r , l 1 , … , l s ∑ b l 1 , … , l s k 1 , … , k r ∂ u k 1 ∂ ⊗ ⋯ ⊗ ∂ u k r ∂ ⊗ d u l 1 ⊗ ⋯ ⊗ d u l s a j 1 , … , j s i 1 , … , i r a^{i_1, \dots, i_r}_{j_1, \dots, j_s} a j 1 , … , j s i 1 , … , i r b l 1 , … , l s k 1 , … , k r b^{k_1, \dots, k_r}_{l_1, \dots, l_s} b l 1 , … , l s k 1 , … , k r
a j 1 , … , j s i 1 , … , i r = ∑ k 1 , … , k r , l 1 , … , l s b l 1 , … , l s k 1 , … , k r ∂ x i 1 ∂ u k 1 ⋯ ∂ x i r ∂ u k r ⋅ ∂ u l 1 ∂ x j 1 ⋯ ∂ u l r ∂ x j r
a^{i_1, \dots, i_r}_{j_1, \dots, j_s} = \sum_{k_1, \dots, k_r, l_1, \dots, l_s}b^{k_1, \dots, k_r}_{l_1, \dots, l_s} \frac{\partial x^{i_1}}{\partial u^{k_1}} \cdots \frac{\partial x^{i_r}}{\partial u^{k_r}} \cdot
\frac{\partial u^{l_1}}{\partial x^{j_1}} \cdots \frac{\partial u^{l_r}}{\partial x^{j_r}}
a j 1 , … , j s i 1 , … , i r = k 1 , … , k r , l 1 , … , l s ∑ b l 1 , … , l s k 1 , … , k r ∂ u k 1 ∂ x i 1 ⋯ ∂ u k r ∂ x i r ⋅ ∂ x j 1 ∂ u l 1 ⋯ ∂ x j r ∂ u l r
の関係がある。