ヘルマート変換の意味・アフィン変換との関係
という式で を にうつすような変換をヘルマート変換と言う。
ヘルマート変換は,測量などに用いられる変換です。
意味
意味
 ヘルマート変換は,図形の形を保つ変換です。図形の大きさ・向き・位置は変わるかもしれませんが,形は変わりません。相似変換とも言います。
ヘルマート変換は,図形の形を保つ変換です。図形の大きさ・向き・位置は変わるかもしれませんが,形は変わりません。相似変換とも言います。
形が変わらないことは,以下の定理からわかります。
ヘルマート変換は「平行移動」「回転」「拡大・縮小」という3種類の変換の合成で表される。
 ただし, の場合は除いて考えます。
ただし, の場合は除いて考えます。
ヘルマート変換を行列で表すと である, とおく。ある が存在して となる。つまり,ヘルマート変換は「 回転」と「 倍の拡大」と「 の平行移動」という3つの変換の合成で表される。
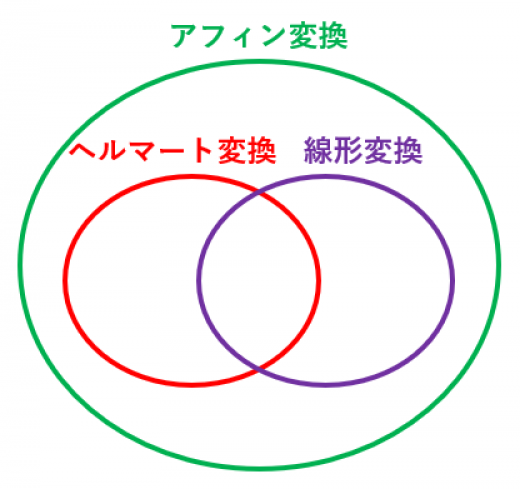
アフィン変換・線形変換との関係
アフィン変換・線形変換との関係
-
中学数学で習う比例の多変数バージョンが線形変換(1次変換)です。2変数の場合, と書けます。
→一次変換の意味と重要な5つの例(折り返し・回転・対称移動) -
平行移動も考えると1次関数になりますが,その多変数バージョンがアフィン変換です。2変数の場合, と書けます。
-
上記のアフィン変換の式で,特に , を満たすものがヘルマート変換です。
各変換の構成要素
-
ヘルマート変換は「平行移動」「回転」「拡大・縮小」の3つの合成で表されます。
-
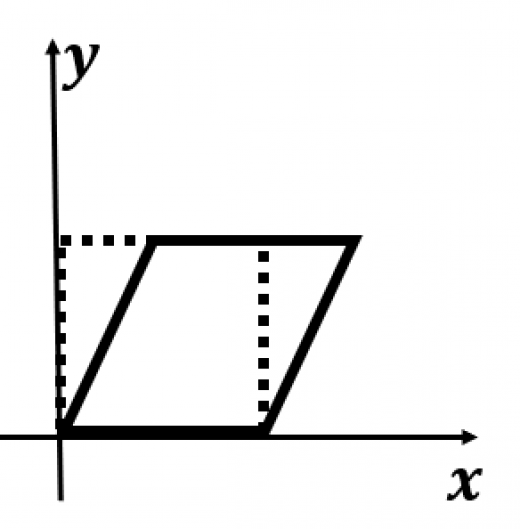
アフィン変換は「平行移動」「回転」「拡大・縮小」に加えて「せん断(スキュー)」という4つの基本的な変換の合成で表されます。「せん断」は図のように正方形(点線)を平行四辺形(実線)に歪めるような変換です。
-
線形変換は「回転」「拡大・縮小」「せん断」の3つの合成で表されます。平行移動は許容しません。
なお,アフィン変換や線形変換は2次元だけでなく一般の 次元でも考えることができますが,3次元以上の場合のヘルマート変換は考えないと思います(少なくとも私は見たことがありません)。
ヘルマート変換と言うとかっこいいですが,ただの相似変換です。ただし,行列 に対して という変換を相似変換と言うこともあるのでややこしいです。