次は,ストークスの定理
∮ C A ⋅ d r = ∫ S ( ∇ × A ) ⋅ n d S
\oint_C \boldsymbol{A} \cdot d\boldsymbol{r} = \int_S \left(\nabla \times \boldsymbol{A}\right) \cdot \boldsymbol{n} dS
∮ C A ⋅ d r = ∫ S ( ∇ × A ) ⋅ n d S
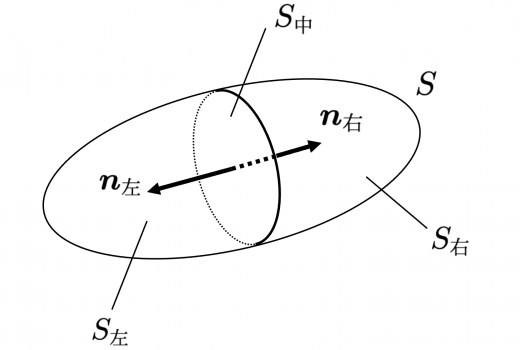
任意のループの周回積分は分割して考えられる
細かい四角形に分解し,
この四角形の一つに焦点をあてて周回積分を計算して,
それをたしあわせる
ループの周回積分は分割して考えられる
A \boldsymbol{A} A C C C ∮ C A ⋅ d r
\oint_C \boldsymbol{A} \cdot d\boldsymbol{r}
∮ C A ⋅ d r
C C C C 中 C_{\text{中}} C 中 C 左 C_{\text{左}} C 左 C 右 C_{\text{右}} C 右 C 中 C_{\text{中}} C 中 C 左 + C 中 ↘ C_{\text{左}} + C_{\text{中}\searrow} C 左 + C 中 ↘ C 1 C_1 C 1 C 右 + C 中 ↖ C_{\text{右}} + C_{\text{中}\nwarrow} C 右 + C 中 ↖ C 2 C_2 C 2
C 1 , C 2 C_1, C_2 C 1 , C 2 ∮ C 1 A ⋅ d r = ∫ C 左 A ⋅ d r + ∫ C 中 ↘ A ⋅ d r ∮ C 2 A ⋅ d r = ∫ C 右 A ⋅ d r + ∫ C 中 ↖ A ⋅ d r \begin{aligned}
\oint_{C_1} \boldsymbol{A} \cdot d\boldsymbol{r} &= \int_{C_{\text{左}}} \boldsymbol{A} \cdot d\boldsymbol{r} + \int_{C_{\text{中}} \searrow} \boldsymbol{A} \cdot d\boldsymbol{r}\\
\oint_{C_2} \boldsymbol{A} \cdot d\boldsymbol{r} &= \int_{C_{\text{右}}} \boldsymbol{A} \cdot d\boldsymbol{r} + \int_{C_{\text{中}} \nwarrow} \boldsymbol{A} \cdot d\boldsymbol{r}
\end{aligned} ∮ C 1 A ⋅ d r ∮ C 2 A ⋅ d r = ∫ C 左 A ⋅ d r + ∫ C 中 ↘ A ⋅ d r = ∫ C 右 A ⋅ d r + ∫ C 中 ↖ A ⋅ d r C 中 ↘ , C 中 ↖ C_{\text{中}} \searrow, C_{\text{中}} \nwarrow C 中 ↘ , C 中 ↖ ∫ C 中 ↘ A ⋅ d r + ∫ C 中 ↖ A ⋅ d r = 0
\int_{C_{\text{中}} \searrow} \boldsymbol{A} \cdot d\boldsymbol{r} + \int_{C_{\text{中}} \nwarrow} \boldsymbol{A} \cdot d\boldsymbol{r} = 0
∫ C 中 ↘ A ⋅ d r + ∫ C 中 ↖ A ⋅ d r = 0 ∮ C 1 A ⋅ d r + ∮ C 2 A ⋅ d r = ∫ C 左 A ⋅ d r + ∫ C 右 A ⋅ d r = ∮ C A ⋅ d r
\oint_{C_1} \boldsymbol{A} \cdot d\boldsymbol{r} + \oint_{C_2} \boldsymbol{A} \cdot d\boldsymbol{r} = \int_{C_{\text{左}}} \boldsymbol{A} \cdot d\boldsymbol{r} + \int_{C_{\text{右}}} \boldsymbol{A} \cdot d\boldsymbol{r} = \oint_C \boldsymbol{A} \cdot d\boldsymbol{r}
∮ C 1 A ⋅ d r + ∮ C 2 A ⋅ d r = ∫ C 左 A ⋅ d r + ∫ C 右 A ⋅ d r = ∮ C A ⋅ d r ∴ ∮ C 1 A ⋅ d r + ∮ C 2 A ⋅ d r = ∮ C A ⋅ d r (**)
\therefore \oint_{C_1} \boldsymbol{A} \cdot d\boldsymbol{r} + \oint_{C_2} \boldsymbol{A} \cdot d\boldsymbol{r} = \oint_C \boldsymbol{A} \cdot d\boldsymbol{r} \tag{**}
∴ ∮ C 1 A ⋅ d r + ∮ C 2 A ⋅ d r = ∮ C A ⋅ d r ( ** ) ( ∗ ∗ ) (**) ( ∗ ∗ ) ( ∗ ) (*) ( ∗ ) 「任意のループ C C C A \boldsymbol{A} A C 1 , C 2 C_1, C_2 C 1 , C 2 A \boldsymbol{A} A ということを表しています。周回積分は面積分同様,好きなようにループを分割して良いわけです。
微小ループの集合として考える
C C C C C C C 1 , C 2 , ⋯ , C N C_1, C_2, \cdots, C_N C 1 , C 2 , ⋯ , C N
このとき,周回積分について,
∮ C A ⋅ d r = lim N → ∞ { ∑ i = 1 N ∮ C i A ⋅ d r }
\oint_C \boldsymbol{A} \cdot d\boldsymbol{r} = \lim_{N \to \infty}\left\{\sum_{i = 1}^N \oint_{C_i} \boldsymbol{A} \cdot d\boldsymbol{r}\right\}
∮ C A ⋅ d r = N → ∞ lim { i = 1 ∑ N ∮ C i A ⋅ d r }
任意のループの周回積分が微小ループの周回積分の総和で置き換えられました。
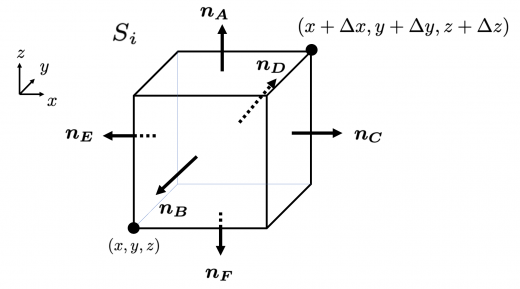
微小ループの周回積分を考える
まず,x y xy x y
この微小ループを C i C_i C i C i C_i C i ∮ C A ⋅ d r = ∫ C A A ⋅ d r + ∫ C B A ⋅ d r + ∫ C C A ⋅ d r + ∫ C D A ⋅ d r
\oint_{C} \boldsymbol{A} \cdot d\boldsymbol{r} = \int_{C_A} \boldsymbol{A} \cdot d\boldsymbol{r} + \int_{C_B} \boldsymbol{A} \cdot d\boldsymbol{r} + \int_{C_C} \boldsymbol{A} \cdot d\boldsymbol{r} + \int_{C_D} \boldsymbol{A} \cdot d\boldsymbol{r}
∮ C A ⋅ d r = ∫ C A A ⋅ d r + ∫ C B A ⋅ d r + ∫ C C A ⋅ d r + ∫ C D A ⋅ d r
ここで,
∫ C A A ⋅ d r = ∫ x x + Δ x ( A x ( x , y , z ) A y ( x , y , z ) A z ( x , y , z ) ) ⋅ ( d x 0 0 ) = { A x ( x , y , z ) + ( Δ x によるズレ ) } Δ x ≈ A x ( x , y , z ) Δ x \begin{aligned}
\int_{C_A} \boldsymbol{A} \cdot d\boldsymbol{r} &= \int_x^{x + \Delta x} \left(\begin{array}{c}
A_x\left(x,y,z\right)\\
A_y\left(x,y,z\right)\\
A_z\left(x,y,z\right)
\end{array}\right) \cdot
\left(\begin{array}{c}
dx\\
0\\
0
\end{array}\right)\\
&= \left\{A_x\left(x,y,z\right) + \left(\Delta x \text{によるズレ}\right)\right\} \Delta x\\
&\approx A_x\left(x,y,z\right) \Delta x
\end{aligned} ∫ C A A ⋅ d r = ∫ x x + Δ x ⎝ ⎛ A x ( x , y , z ) A y ( x , y , z ) A z ( x , y , z ) ⎠ ⎞ ⋅ ⎝ ⎛ d x 0 0 ⎠ ⎞ = { A x ( x , y , z ) + ( Δ x によるズレ ) } Δ x ≈ A x ( x , y , z ) Δ x ∫ C B A ⋅ d r = ∫ y y + Δ y ( A x ( x + Δ x , y , z ) A y ( x + Δ x , y , z ) A z ( x + Δ x , y , z ) ) ⋅ ( 0 d y 0 ) = { A y ( x + Δ x , y , z ) + ( Δ y によるズレ ) } Δ y ≈ A y ( x + Δ x , y , z ) Δ y \begin{aligned}
\int_{C_B} \boldsymbol{A} \cdot d\boldsymbol{r} &= \int_y^{y + \Delta y} \left(\begin{array}{c}
A_x\left(x+\Delta x,y,z\right)\\
A_y\left(x+\Delta x,y,z\right)\\
A_z\left(x+\Delta x,y,z\right)
\end{array}\right) \cdot
\left(\begin{array}{c}
0\\
dy\\
0
\end{array}\right)\\
&= \left\{A_y\left(x+\Delta x,y,z\right) + \left(\Delta y \text{によるズレ}\right)\right\} \Delta y\\
&\approx A_y\left(x+\Delta x,y,z\right) \Delta y
\end{aligned} ∫ C B A ⋅ d r = ∫ y y + Δ y ⎝ ⎛ A x ( x + Δ x , y , z ) A y ( x + Δ x , y , z ) A z ( x + Δ x , y , z ) ⎠ ⎞ ⋅ ⎝ ⎛ 0 d y 0 ⎠ ⎞ = { A y ( x + Δ x , y , z ) + ( Δ y によるズレ ) } Δ y ≈ A y ( x + Δ x , y , z ) Δ y ∫ C C A ⋅ d r = − A x ( x , y + Δ y , z ) Δ x ∫ C D A ⋅ d r = − A y ( x , y , z ) Δ y \begin{aligned}
\int_{C_C} \boldsymbol{A} \cdot d\boldsymbol{r} &= -A_x (x,y + \Delta y, z) \Delta x\\
\int_{C_D} \boldsymbol{A} \cdot d\boldsymbol{r} &= -A_y (x,y, z) \Delta y\\
\end{aligned} ∫ C C A ⋅ d r ∫ C D A ⋅ d r = − A x ( x , y + Δ y , z ) Δ x = − A y ( x , y , z ) Δ y ∮ C i A ⋅ d r = Δ x ( A x ( x , y , z ) − A x ( x , y + Δ y , z ) ) + Δ y ( A y ( x + Δ x , y , z ) − A y ( x , y , z ) ) = Δ x ( − ∂ A x ∂ y ) Δ y + Δ y ( ∂ A y ∂ x ) Δ x = Δ x Δ y ( ∂ A y ∂ x − ∂ A x ∂ y ) = Δ x Δ y ( ∇ × A ) z = Δ x Δ y ( ∇ × A ) ⋅ n z \begin{aligned}
&\oint_{C_i} \boldsymbol{A} \cdot d\boldsymbol{r} \\&= \Delta x \left(A_x\left(x,y,z\right) -A_x (x,y + \Delta y, z)\right) + \Delta y \left(A_y\left(x+\Delta x,y,z\right)-A_y (x,y, z) \right)\\
&= \Delta x \left(-\dfrac{\partial{A_x}}{\partial{y}}\right)\Delta y + \Delta y \left(\dfrac{\partial{A_y}}{\partial{x}}\right)\Delta x\\
&= \Delta x \Delta y \left(\dfrac{\partial{A_y}}{\partial{x}} - \dfrac{\partial{A_x}}{\partial{y}}\right)\\
&= \Delta x \Delta y \left(\nabla \times \boldsymbol{A}\right)_z\\
&= \Delta x \Delta y \left(\nabla \times \boldsymbol{A}\right) \cdot \boldsymbol{n_z}
\end{aligned} ∮ C i A ⋅ d r = Δ x ( A x ( x , y , z ) − A x ( x , y + Δ y , z ) ) + Δ y ( A y ( x + Δ x , y , z ) − A y ( x , y , z ) ) = Δ x ( − ∂ y ∂ A x ) Δ y + Δ y ( ∂ x ∂ A y ) Δ x = Δ x Δ y ( ∂ x ∂ A y − ∂ y ∂ A x ) = Δ x Δ y ( ∇ × A ) z = Δ x Δ y ( ∇ × A ) ⋅ n z n z \boldsymbol{n_z} n z + z +z + z
y z yz yz z x zx z x ∮ C i A ⋅ d r = Δ y Δ z ( ∇ × A ) ⋅ n x ∮ C i A ⋅ d r = Δ z Δ x ( ∇ × A ) ⋅ n y \begin{aligned}
\oint_{C_i} \boldsymbol{A} \cdot d\boldsymbol{r} &= \Delta y \Delta z \left(\nabla \times \boldsymbol{A}\right) \cdot \boldsymbol{n_x}\\
\oint_{C_i} \boldsymbol{A} \cdot d\boldsymbol{r} &= \Delta z \Delta x \left(\nabla \times \boldsymbol{A}\right) \cdot \boldsymbol{n_y}\\
\end{aligned} ∮ C i A ⋅ d r ∮ C i A ⋅ d r = Δ y Δ z ( ∇ × A ) ⋅ n x = Δ z Δ x ( ∇ × A ) ⋅ n y
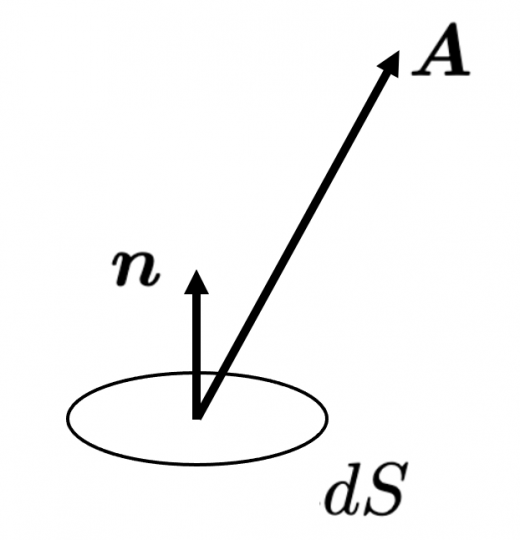
これらの式を見ると,∮ C i A ⋅ d r \displaystyle\oint_{C_i} \boldsymbol{A} \cdot d\boldsymbol{r} ∮ C i A ⋅ d r ( ループの面積 ) ⋅ ( ∇ × A ) ⋅ n ループの単位法線ベクトル
(\text{ループの面積}) \cdot \left(\nabla \times \boldsymbol{A}\right) \cdot \boldsymbol{n_{\text{ループの単位法線ベクトル}}}
( ループの面積 ) ⋅ ( ∇ × A ) ⋅ n ループの単位法線ベクトル ∮ C i A ⋅ d r = ( ∇ × A ) ⋅ n i Δ S i
\oint_{C_i} \boldsymbol{A} \cdot d\boldsymbol{r} = \left(\nabla \times \boldsymbol{A}\right) \cdot \boldsymbol{n_i} \Delta S_i
∮ C i A ⋅ d r = ( ∇ × A ) ⋅ n i Δ S i
もとの式に代入する
微小ループの結果を元の式に代入します。任意のループにおける周回積分は
∮ C A ⋅ d r = lim N → ∞ { ∑ i = 1 N ( ∇ × A ) ⋅ n i Δ S i }
\oint_C \boldsymbol{A} \cdot d\boldsymbol{r} = \lim_{N \to \infty}\left\{\sum_{i = 1}^N \left(\nabla \times \boldsymbol{A}\right) \cdot \boldsymbol{n_i} \Delta S_i\right\}
∮ C A ⋅ d r = N → ∞ lim { i = 1 ∑ N ( ∇ × A ) ⋅ n i Δ S i } ∮ C A ⋅ d r = ∫ S ( ∇ × A ) ⋅ n d S
\oint_C \boldsymbol{A} \cdot d\boldsymbol{r} = \int_S \left(\nabla \times \boldsymbol{A}\right) \cdot \boldsymbol{n} dS
∮ C A ⋅ d r = ∫ S ( ∇ × A ) ⋅ n d S
初等なベクトル解析の一つの山場とも言える定理ですね。名前がかっこよくてどちらも好きです。