位置エネルギーの定義と例(重力・弾性力・クーロン力)
保存力には, のみの関数である「位置エネルギー」を定義することができる。位置エネルギーと運動エネルギーを合わせた「力学的エネルギー」は,非保存力のする仕事によって変化する。
まず,保存力を定義し,その上で位置エネルギーを定義します。その後,非保存力の仕事と力学的エネルギーの関係の式を導出します。また,位置エネルギーの例として,重力による位置エネルギー,弾性力による位置エネルギー,クーロン力による位置エネルギーを紹介します。
保存力の定義
保存力の定義
空間の各点で,質点がその位置に来た時,それに作用する力が一義的に決まっている状況を考えます。そのようなとき,空間は力の場になっているといいます。力の場において,任意の経路 に対し, を始点,終点として, を満たす特別な力 を保存力といいます。つまり,始点と終点さえ決めてしまえば,どんな経路を通って物体を運んでも,保存力のする仕事は変わらない という特別な力であるということです。ここで,この式は という式と同値です。ただし, は を逆向きに進む経路を表します。 は任意に経路をとっていますので,これは任意のループ を使って置き換えることができて, と同値になります。 ここでストークスの定理:
を用いれば, が囲む図形を として, つまり, は任意にとれるので, と同値になります。
つまり, は が保存力であることの必要十分条件であることがわかります。
また,保存力の和は保存力であることは,定義から簡単にわかります。
位置エネルギーの定義
位置エネルギーの定義
位置エネルギー(ポテンシャルエネルギーと呼ぶこともあります)は,保存力に対して定義される物理量です。保存力 に対し, を基準にした位置エネルギー を, と定義します。保存力の定義により,この は を決めれば一意に定まります。 は のみの関数です。この式から, さて,全微分の式から, とかけます。前2式において, は任意に取ることができますから, このように,保存力は位置エネルギーを使って簡潔に表すことができます。
非保存力の仕事と力学的エネルギーの関係
非保存力の仕事と力学的エネルギーの関係
仕事と運動エネルギーの関係の記事で, が成立することを導きました。じつは,このうちの を保存力と非保存力に分解すると,保存力の成分はエネルギーとして含めてしまうことができるのです。いかにその説明をします。
を保存力の和 と非保存力の和 に分解すると, ここで,力学的エネルギー を つまり,運動エネルギーと全位置エネルギーの和として定義すれば, と書くことができるのです。
ここから,「ある時間内で増加した分の力学的エネルギーは,非保存力のした仕事に等しい」ということができます。特に,「保存力のみが働く場においては,力学的エネルギーは一定である」ということもいうことができます。これを,力学的エネルギー保存の法則と呼びます。
重力などは,よく位置エネルギーで考えろと言われますが,その理由は上記のようなところにあったのです。保存力はエネルギーの項として含めることができる,それならば最初から運動エネルギーと混ぜて計算してしまえば,毎回仕事を求める必要がなくて楽じゃん! という発想です。とても興味深い考察だと思います。
この記事に関連するQ&A
重力による位置エネルギーの公式
重力による位置エネルギーの公式
重力はベクトルで と書くことができます。 軸は鉛直上向き方向としてとっています。計算するまでもなく, ですから,重力は保存力です。
保存力はどんな経路で線積分しても値がかわらないので,もっとも簡単な経路を取りましょう。

上図のような経路をとります。このとき, です。 の 成分は であることから, と求めることができます。特に, のとき, となって,みなさんがよく知っている形の式になります。
弾性力による位置エネルギーの公式
弾性力による位置エネルギーの公式
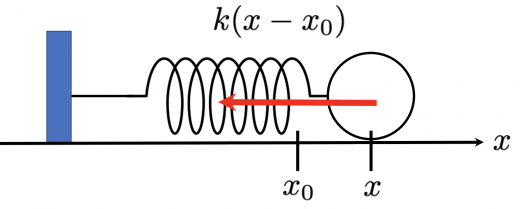
バネの自然長を ,バネ定数を とします。図のような状況の時,バネの弾性力は と表せます。右向きに 軸をとっています。ベクトルでは とかけます。これは少し計算すると,すぐに であることがわかるので,弾性力は保存力です。
これより, と求めることができます。
クーロン力による位置エネルギーの公式
クーロン力による位置エネルギーの公式
原点に電気量 を持つ点電荷をおきます。このとき,単位電荷が受ける力は,クーロンの法則より, とかくことができます。ここで, です。つまり, も によることに注意する必要があります。このもと, を計算することになるのですが,これは少し大変です。ぜひ練習としてやってみてください。
計算の末, であることがわかるので,クーロン力は保存力です。
さて,位置エネルギーを求めますが,基準点 から まで直線で結ぶと計算が大変になってしまいます。

そこで,上図のような経路 をとることを考えてみます。
は原点を中心とする円弧上の運動です。つまりクーロン力とは直交する方向の移動です。よって, 上では となります。よって,実質 の経路のみを考えればよいことになります。よって, 方向の単位ベクトル を用いて 普通,クーロン力の位置エネルギーの基準点は にとることが多く,このとき, となります。
重力,弾性力,クーロン力による位置エネルギーの導出は,線積分のいい練習になります。