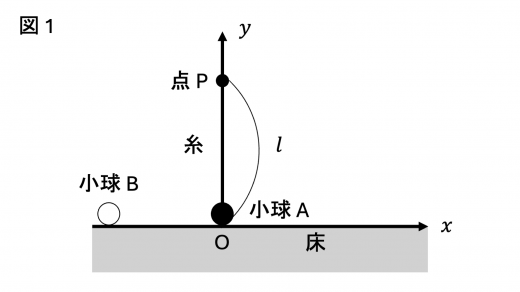
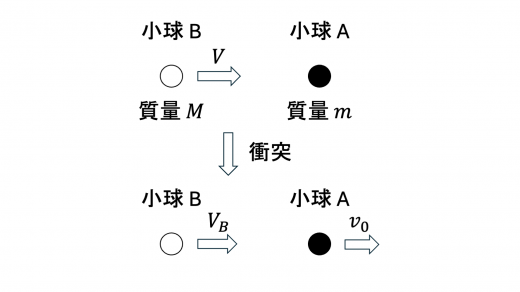
図1 のように,水平でなめらかな床の上に,質量 m の
小球 A と,質量 M の小球 B を置き,小球 A に長さ l の糸をつける。
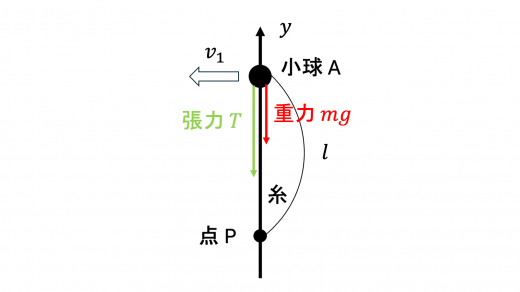
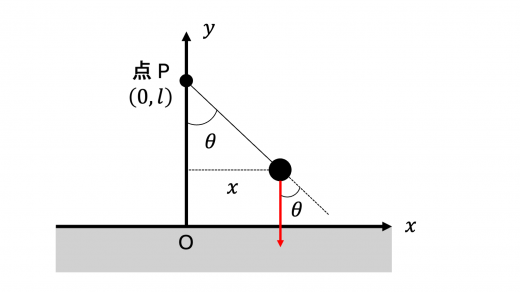
小球 A と小球 B の大きさは l に比べて十分小さく無視する。小球 A の位置を原点 O として,床面内で小球 B から小球 A に向かう向きに x 軸をとり,鉛直上向きに y 軸をとる。そして,小球 A を床に静止させたまま,糸を y 軸に沿ってたるまないように伸ばし,糸の他端を点 P に固定する。点 P は y 軸上にあり,その y 座標は l である。
以下では空気抵抗を無視し,重力加速度の大きさを g とする。
また糸の質量は無視し,小球 A の運動中に糸は伸び縮みしない。
小球 B を速さ V で x 軸正の向きに打ち出し,小球 A に衝突させた。この衝突は弾性衝突である。
このとき,衝突直後の小球 A の速さ v0 は (1) である。また衝突後の小球 B の速度の x 成分は (2) である。
(1),(2) の解答群
a. Vb. 2MM+mVc. MmVd. M+m2MV
e. 2Mm−MVf. 2MM−mVg. M+mm−MVh. M+mM−mV
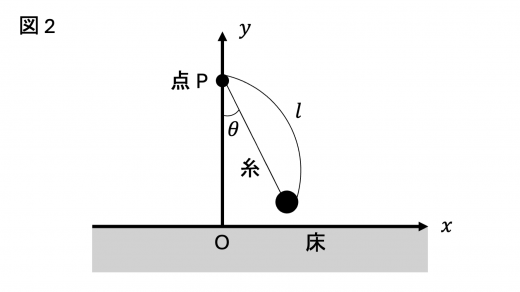
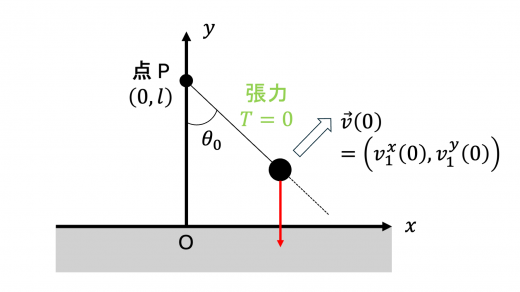
小球 B との衝突後,小球 A は xy 平面内を運動する。ここで,図2のように糸と y 軸とのなす角度を θ(0≤θ<2π) とする。
a. glsinθ0b. glcosθ0c. −glsinθ0d. 2−glcosθ0
e. 2glsinθ0f. 2glcosθ0g. −2glsinθ0h. 22glcosθ0
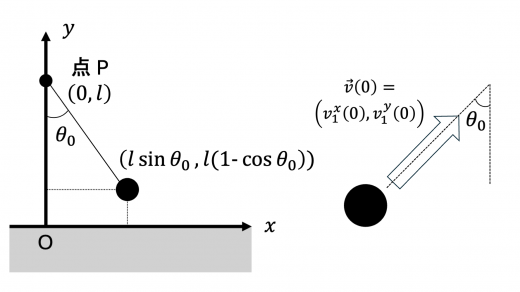
さらに,θ=θ0 のときから,再び糸のたるみがなくなるまでの時間は (3) である。また,糸のたるみがなくなった瞬間の小球 A の x 座標は (6) であり,y 座標は (7) である。例えば,糸のたるみがなくなった瞬間の θ が θ0+π であった場合,θ0 は (8) である。ただし,糸がたるんでいる間に,糸が点 P に絡んだり,小球 A が点 P と衝突することはなかった。
(5) の解答群
a. 4gv1sinθ0b. 4gv1cosθ0c. 2gv1sinθ0d. 2gv1cosθ0e. gv1sinθ0 f. gv1cosθ0g. g2v1sinθ0h. g2v1cosθ0i. g4v1sinθ0j. g4v1cosθ0
(6) の解答群
a. lsinθ0(1−4sin2θ0)b. lsinθ0(1−4cos2θ0)
c. lcosθ0(1−4sin2θ0)d. lcosθ0(1−4cos2θ0)
e. −lsinθ0(1−4sin2θ0)f. −lsinθ0(1−4cos2θ0)
g. −lcosθ0(1−4sin2θ0)h. −lcosθ0(1−4cos2θ0)
(7) の解答群
a. l(1+sinθ0(1−4sin2θ0))b. l(1+sinθ0(1−4cos2θ0))
c. l(1+cosθ0(1−4sin2θ0))b. l(1+cosθ0(1−4cos2θ0))
e. l(1−sinθ0(1−4sin2θ0))f. l(1−sinθ0(1−4cos2θ0))
g. l(1−cosθ0(1−4sin2θ0))h. l(1−cosθ0(1−4cos2θ0))
(8) の解答群
a. 2πb. 85πc. 32πd. 43π
e. 65πf. 76πg. 87πh. π
次に,糸がたるまないように小球 A を少し持ち上げてからはなしたところ,小球 A は xy 平面内で振動した。振動の振幅は l に比べて十分小さく,小球 A の運動は x 軸方向の単振動と近似することができる。x 座標が x となる位置における小球 A にはたらく力の x 成分 Fx は,小球 A にはたらく力の系に垂直な成分に等しいと近似でき,定数 k を用いて Fx=kx と表すことができる。ここで,k は (9) である。また,このときの小球 A の振動の周期を T とすると,T は (10) である。
(9) の解答群
a. l2mgb. lmgc. 2lmgd. lm
e. −l2mgf. −lmgg. −2lmgh. −lm
(10) の解答群
a. 2πglb. πglc. 2πlgd. πlg
e. 2π1glf. π1glg. 2π1lgh. π1lg
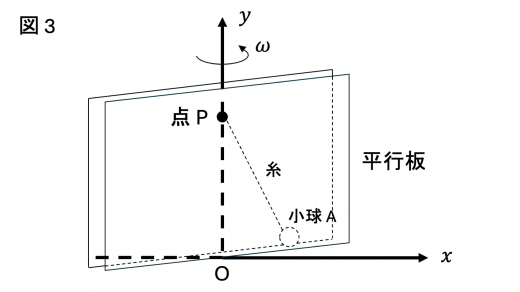
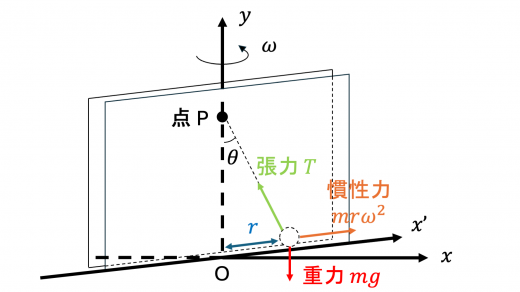
次に,図3のように2枚の平らでなめらかな表面をもつ板を平行に配置して,小球 A,糸,点 P をはさむ。
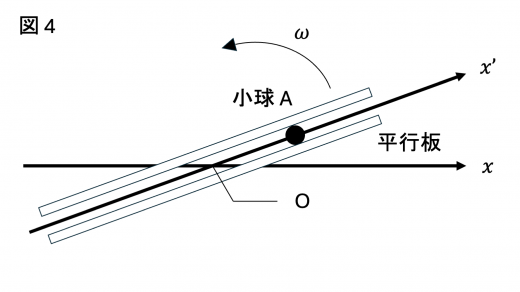
小球 A と2枚の平行板とは常に接している。さらに,y 軸を回転軸として一定の角速度 ω で鉛直上方から見て反時計回りに,平行板を回転させる。ここで,平行板は十分に広く,小球 A が運動の途中で平行板の間から外へ出ることはない。図4はこの運動を鉛直上方から見下ろした様子をあらわす。
図4に示すように,床面内で平行板の間に沿う方向に x′ 軸をとると,平行板の回転と共に x′ 軸も y 軸を回転軸として回転する。このとき,ω>ω0 であれば,小球 A の x′ 座標が 0 ではない一定の値に保たれる状態を実現できるが,そうでなければ実現できない。このような ω0 は (11) である。
最後に,ω0 より小さい角速度 ω で回転している平行板の間を,小球 A が振動する場合を考える。振動の振幅は l に比べて十分小さく,平行板が静止して見える観測者から見て,小球 A は平行板の間を x′ 軸に沿って原点 O を中心に単振動する。
このとき,x′ 座標が x′ の位置における小球 A にはたらく力の x′ 成分は,kx′ と慣性力の x′ 成分との和である。
ただし,平行板が静止して見える観測者から見て,運動中の小球 A にはたらく慣性力の x′ 成分は,その小球 A が x′ 座標が x′ の位置に静止していると仮定した場合にはたらく慣性力の x′ 成分と等しく,小球 A の x′ 座標のみで決まる。
いま,小球 A の x′ 軸に沿った単振動の周期は 2T であった。
このとき ω は (12) である。