大問 I
(1)
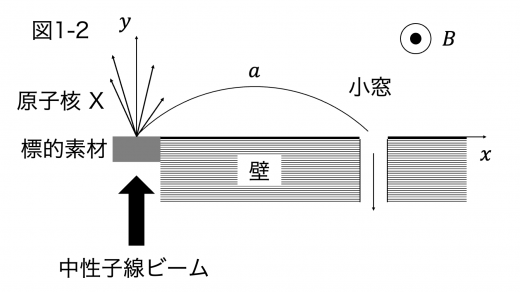
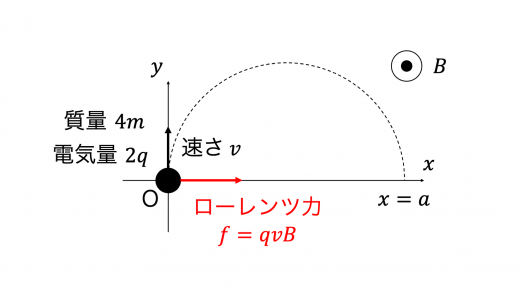
原子核は電荷を持った質点であり,磁場からはローレンツ力 (ローレンツ力の意味と式|磁場中の荷電粒子の運動 ) を受けます。このローレンツ力は常に速度と垂直にはたらくので,原子核はローレンツ力を中心力とする等速円運動 (円運動とは|円運動における加速度・向心力・遠心力 を行います。
等速円運動の軌道を考えると,壁面に垂直に小窓を通過する原子核は,初速度が y y y r r r
r = a 2
r = \dfrac{a}{2}
r = 2 a
となります。
原子核の速さを v v v
4 m v 2 r = 2 q v B
4 m \dfrac{v^2}{r} = 2 q v B
4 m r v 2 = 2 q v B
∴ v = 1 2 q B r m = 1 4 q B a m
\begin{aligned}
\therefore v &= \dfrac{1}{2} \dfrac{q B r}{m} \\
&= \dfrac{1}{4} \dfrac{q B a}{m}
\end{aligned}
∴ v = 2 1 m qB r = 4 1 m qB a
したがって,求める運動エネルギー K K K
K = 1 2 4 m v 2 = 1 8 q 2 B 2 a 2 m
\begin{aligned}K&= \dfrac{1}{2} 4m v^2 \\
&= \dfrac{1}{8} \dfrac{q^2 B^2 a^2}{m}
\end{aligned}
K = 2 1 4 m v 2 = 8 1 m q 2 B 2 a 2
となります。
(2)
(1)の軌道で等速円運動する原子核が小窓に到達する時間 t t t T cir T_{\text{cir}} T cir
t = 1 2 T cir
t = \dfrac{1}{2} T_{\text{cir}}
t = 2 1 T cir
ここで,(1)の円運動の角速度を ω \omega ω v = 1 2 a ω v = \dfrac{1}{2} a \omega v = 2 1 aω
T cir = 2 π ω = π a v = 4 π m q B
\begin{aligned}
T_{\text{cir}} &= \dfrac{2 \pi}{\omega} \\
&= \pi \dfrac{a}{v} \\
&= 4 \pi \dfrac{m}{q B}
\end{aligned}
T cir = ω 2 π = π v a = 4 π qB m
したがって,
t = 2 π m q B
t = 2 \pi \dfrac{m}{q B}
t = 2 π qB m
となります。ここで,X の半減期が T T T t t t
2 − t T = 2 − 2 π m q B T
2^{- \dfrac{t}{T}} = 2^{- 2 \pi \dfrac{m}{q B T}}
2 − T t = 2 − 2 π qBT m
これが f f f
2 − 2 π m q B T ≥ f
2^{- 2 \pi \dfrac{m}{q B T}} \geq f
2 − 2 π qBT m ≥ f
∴ − 2 π m q B T ≥ log 2 f = − log 2 1 f
\therefore -2 \pi \dfrac{m}{q B T} \geq \log_2 f = - \log_2 {\dfrac{1}{f}}
∴ − 2 π qBT m ≥ log 2 f = − log 2 f 1
0 < f < 1 0 < f < 1 0 < f < 1 log 2 1 f > 0 \log_2 {\dfrac{1}{f}} > 0 log 2 f 1 > 0 B B B B c B_c B c
B c = 2 π log 2 1 f m q T
B_c = \dfrac{2 \pi}{\log_2 {\dfrac{1}{f}}} \dfrac{m}{q T}
B c = log 2 f 1 2 π qT m
(3)
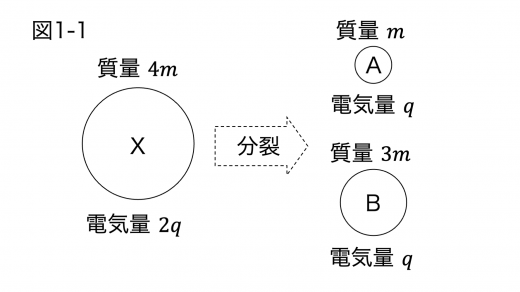
図1-1から,運動量保存則 (運動量保存則とエネルギー保存則の導出 )より
m v A = 3 m v B
m v_{\text{A}} = 3m v_{\text{B}}
m v A = 3 m v B
∴ v A = 3 v B
\therefore v_{\text{A}} = 3 v_{\text{B}}
∴ v A = 3 v B
また,問題文中に,「分裂の際に,…質量欠損に対応するエネルギーが A と B の運動エネルギーとなる」と書いてあることより
( Δ m ) c 2 = 1 2 m v A 2 + 3 2 m v B 2
(\Delta m) c^2 = \dfrac{1}{2} m v_{\text{A}}^2 + \dfrac{3}{2} m v_{\text{B}}^2
( Δ m ) c 2 = 2 1 m v A 2 + 2 3 m v B 2
これらより v A , v B v_{\text{A}}, v_{\text{B}} v A , v B
v A = 3 2 Δ m m c , v B = 1 6 Δ m m c
v_{\text{A}} = \sqrt{\dfrac{3}{2} \dfrac{\Delta m}{m}} c, \, v_{\text{B}} = \sqrt{\dfrac{1}{6} \dfrac{\Delta m}{m}} c
v A = 2 3 m Δ m c , v B = 6 1 m Δ m c
と求められます。
大問 II
(1)
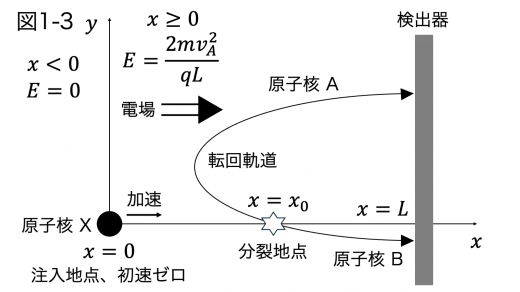
静止系での分裂前までの X の加速度を a a a
4 m a = 2 q E = 4 m v A 2 L
4m a = 2q E = 4 \dfrac{m v_\text{A}^2}{L}
4 ma = 2 qE = 4 L m v A 2
∴ a = v A 2 L
\therefore a = \dfrac{v_\text{A}^2}{L}
∴ a = L v A 2
これより,時刻 t t t v v v x x x 等加速度運動・等加速度直線運動の公式 )
v = a t , x = 1 2 a t 2
v = a t, \, x = \dfrac{1}{2} a t^2
v = a t , x = 2 1 a t 2
x = x 0 x = x_0 x = x 0 t = t 0 t = t_0 t = t 0
x 0 = 1 2 a t 0 2
x_0 = \dfrac{1}{2} a t_0^2
x 0 = 2 1 a t 0 2
∴ t 0 = 2 x 0 a
\therefore t_0 = \sqrt{2 \dfrac{x_0}{a}}
∴ t 0 = 2 a x 0
このとき v = α v A v = \alpha v_\text{A} v = α v A
α v A = a t 0 = 2 a x 0 = 2 x 0 L v A
\alpha v_\text{A} = a t_0 = \sqrt{2 a x_0} = \sqrt{2 \dfrac{x_0}{L}} v_\text{A}
α v A = a t 0 = 2 a x 0 = 2 L x 0 v A
∴ α = 2 x 0 L (ア)
\therefore \alpha = \sqrt{2 \dfrac{x_0}{L}} \tag{ア}
∴ α = 2 L x 0 ( ア )
これより x 0 x_0 x 0 α \alpha α
x 0 = 1 2 α 2 L
x_0 = \dfrac{1}{2} \alpha^2 L
x 0 = 2 1 α 2 L
と表されるので,t 0 t_0 t 0
t 0 = α 2 L a = α L v A (イ)
\begin{aligned}
t_0 &= \sqrt{\dfrac{\alpha^2 L}{a}} \\
&= \alpha \dfrac{L}{v_\text{A}} \tag{イ}
\end{aligned}
t 0 = a α 2 L = α v A L ( イ )
検出器に対する A の初速度の x , y x, y x , y
x : v A cos θ 0 + α v A = ( cos θ 0 + α ) v A
x : v_\text{A} \cos{\theta_0} + \alpha v_\text{A} = (\cos{\theta_0} + \alpha) v_\text{A}
x : v A cos θ 0 + α v A = ( cos θ 0 + α ) v A
y : v A sin θ 0
y : v_\text{A} \sin{\theta_0}
y : v A sin θ 0
と表されます。これが負であることより,θ 0 \theta_0 θ 0
cos θ 0 < − α (ウ)
\cos{\theta_0} < - \alpha \tag{ウ}
cos θ 0 < − α ( ウ )
と求められます。
これより,もし − α < − 1 - \alpha < -1 − α < − 1 1 < α 1 < \alpha 1 < α x 0 x_0 x 0
x 0 > 1 2 L (エ)
x_0 > \dfrac{1}{2} L \tag{エ}
x 0 > 2 1 L ( エ )
が課されることがわかります。
さて,条件 (ウ) が満たされ,A が後方に飛ぶときを考えます。このとき検出器に対する A の運動を考えます。x x x
m a A = q E = 2 m v A 2 L
m a_{\text{A}} = q E = \dfrac{2 m v_\text{A}^2}{L}
m a A = qE = L 2 m v A 2
∴ a A = 2 v A 2 L
\therefore a_{\text{A}} = \dfrac{2 v_\text{A}^2}{L}
∴ a A = L 2 v A 2
すなわち,この a A a_{\text{A}} a A ( cos θ 0 + α ) v A (\cos{\theta_0} + \alpha) v_{\text{A}} ( cos θ 0 + α ) v A V A V_\text{A} V A X A X_\text{A} X A t ′ = 0 t' = 0 t ′ = 0
V A = 2 v A 2 L t ′ + ( cos θ 0 + α ) v A
V_\text{A} = \dfrac{2 v_\text{A}^2}{L} t' + (\cos{\theta_0} + \alpha) v_{\text{A}}
V A = L 2 v A 2 t ′ + ( cos θ 0 + α ) v A
X A = v A 2 L t ′ 2 + ( cos θ 0 + α ) v A t ′ + x 0
X_\text{A} = \dfrac{ v_\text{A}^2}{L} t'^2 + (\cos{\theta_0} + \alpha) v_{\text{A}} t' + x_0
X A = L v A 2 t ′2 + ( cos θ 0 + α ) v A t ′ + x 0
A が転回運動で x < 0 x < 0 x < 0 X A X_\text{A} X A t ′ t' t ′
D = ( cos θ 0 + α ) 2 v A 2 − 4 v A 2 L x 0 < 0
D = (\cos{\theta_0} + \alpha)^2 v_\text{A}^2 - 4 \dfrac{ v_\text{A}^2}{L} x_0 < 0
D = ( cos θ 0 + α ) 2 v A 2 − 4 L v A 2 x 0 < 0
転回運動が起こるとき ( cos θ 0 + α ) < 0 (\cos{\theta_0} + \alpha) < 0 ( cos θ 0 + α ) < 0
− 2 x 0 L = − 2 α < cos θ 0 + α < 0
-2 \sqrt{\dfrac{x_0}{L}} = - \sqrt{2} \alpha < \cos{\theta_0} + \alpha < 0
− 2 L x 0 = − 2 α < cos θ 0 + α < 0
∴ cos θ 0 > − ( 1 + 2 ) α (オ)
\therefore \cos{\theta_0} > - (1 + \sqrt{2}) \alpha \tag{オ}
∴ cos θ 0 > − ( 1 + 2 ) α ( オ )
式 (オ) が θ 0 \theta_0 θ 0 x 0 x_0 x 0 − 1 > − ( 1 + 2 ) α -1 > - (1 + \sqrt{2}) \alpha − 1 > − ( 1 + 2 ) α
α = 2 x 0 L > 1 1 + 2
\alpha = \sqrt{2 \dfrac{x_0}{L}} > \dfrac{1}{1 + \sqrt{2}}
α = 2 L x 0 > 1 + 2 1
∴ x 0 > 1 2 ( 1 + 2 ) 2 L (カ)
\therefore x_0 > \dfrac{1}{2 (1 + \sqrt{2})^2 } L \tag{カ}
∴ x 0 > 2 ( 1 + 2 ) 2 1 L ( カ )
と求められます。
(2)
検出器に対する A の y y y v A sin θ 0 v_{\text{A}} \sin{\theta_0} v A sin θ 0 x x x sin θ 0 = 0 \sin{\theta_0} = 0 sin θ 0 = 0 θ 0 = 0 , π \theta_0 = 0, \pi θ 0 = 0 , π
θ 0 = 0 \theta_0 = 0 θ 0 = 0
このとき分裂時の A の x x x a A a_{\text{A}} a A x x x
X A = L X_{\text{A}} = L X A = L t ′ t' t ′
v A 2 L t ′ 2 + ( 1 + α ) v A t ′ + x 0 = L
\dfrac{v_\text{A}^2}{L} t'^2 + (1 + \alpha) v_\text{A} t' + x_0 = L
L v A 2 t ′2 + ( 1 + α ) v A t ′ + x 0 = L
∴ v A 2 t ′ 2 + ( 1 + α ) v A L t ′ + L ( x 0 − L ) = 0
\therefore v_\text{A}^2 t'^2 + (1 + \alpha) v_\text{A} L t' + L (x_0 - L) = 0
∴ v A 2 t ′2 + ( 1 + α ) v A L t ′ + L ( x 0 − L ) = 0
∴ t ′ = − ( 1 + α ) v A L + ( 1 + α ) 2 v A 2 L 2 − 4 v A 2 L ( x 0 − L ) 2 v A 2 ( ∵ t ′ > 0 )
\begin{aligned}
\therefore t' &= \dfrac{- (1 + \alpha) v_\text{A} L + \sqrt{(1 + \alpha)^2 v_\text{A}^2 L^2 - 4 v_\text{A}^2 L (x_0 - L)}}{2 v_\text{A}^2} \, (\because t' > 0)
\end{aligned}
∴ t ′ = 2 v A 2 − ( 1 + α ) v A L + ( 1 + α ) 2 v A 2 L 2 − 4 v A 2 L ( x 0 − L ) ( ∵ t ′ > 0 )
このときの A の速度 V A V_{\text{A}} V A
V A = 2 v A 2 L t ′ + V 0 = − ( 1 + α ) v A L ± ( 1 + α ) 2 v A 2 L 2 − 4 v A 2 L ( x 0 − L ) L + ( 1 + α ) v A = ( 1 + α ) 2 − 4 ( x 0 L − 1 ) v A = ( 1 + α ) 2 − 4 ( 1 2 α 2 − 1 ) v A = 6 − ( α − 1 ) 2 v A
\begin{aligned}
V_{\text{A}} &= 2 \dfrac{v_{\text{A}}^2}{L} t' + V_0 \\
&= \dfrac{- (1 + \alpha) v_\text{A} L \pm \sqrt{(1 + \alpha)^2 v_\text{A}^2 L^2 - 4 v_\text{A}^2 L (x_0 - L)}}{L} + (1 + \alpha) v_{\text{A}} \\
&= \sqrt{(1 + \alpha)^2 - 4 \left( \dfrac{x_0}{L} - 1 \right)} v_\text{A} \\
&= \sqrt{(1 + \alpha)^2 - 4 \left( \dfrac{1}{2} \alpha^2 - 1 \right)} v_\text{A}\\
&= \sqrt{6 - (\alpha - 1)^2} v_\text{A}
\end{aligned}
V A = 2 L v A 2 t ′ + V 0 = L − ( 1 + α ) v A L ± ( 1 + α ) 2 v A 2 L 2 − 4 v A 2 L ( x 0 − L ) + ( 1 + α ) v A = ( 1 + α ) 2 − 4 ( L x 0 − 1 ) v A = ( 1 + α ) 2 − 4 ( 2 1 α 2 − 1 ) v A = 6 − ( α − 1 ) 2 v A
いま,転回軌道が起こらないことより,0 < x 0 < L 0< x_0 < L 0 < x 0 < L α \alpha α
0 < α < 2
0 < \alpha < \sqrt{2}
0 < α < 2
この範囲で α \alpha α V A V_{\text{A}} V A
5 v A < V A < 6 v A
\sqrt{5} v_\text{A} < V_{\text{A}} < \sqrt{6} v_\text{A}
5 v A < V A < 6 v A
したがって,A の運動エネルギー K A K_{\text{A}} K A
5 2 m v A 2 < K A < 3 m v A 2
\dfrac{5}{2} m v_\text{A}^2 < K_{\text{A}} < 3 m v_\text{A}^2
2 5 m v A 2 < K A < 3 m v A 2
θ 0 = π \theta_0 = \pi θ 0 = π
このとき,分裂時の位置 x 0 x_0 x 0 x 0 x_0 x 0
1 2 ( 1 + 2 ) 2 L < x 0 < L
\dfrac{1}{2 (1 + \sqrt{2})^2 } L < x_0 < L
2 ( 1 + 2 ) 2 1 L < x 0 < L
∴ 1 1 + 2 α = 2 − 1 < α < 2
\therefore \dfrac{1}{1 + \sqrt{2}} \alpha = \sqrt{2} - 1 < \alpha < \sqrt{2}
∴ 1 + 2 1 α = 2 − 1 < α < 2
このときの速さ V A V_\text{A} V A
V A = ( − 1 + α ) 2 − 4 ( 1 2 α 2 − 1 ) v A = 6 − ( α + 1 ) 2 v A
\begin{aligned}
V_{\text{A}} &= \sqrt{(-1 + \alpha)^2 - 4 \left( \dfrac{1}{2} \alpha^2 - 1 \right)} v_\text{A} \\
&= \sqrt{6 - (\alpha + 1)^2 } v_\text{A}
\end{aligned}
V A = ( − 1 + α ) 2 − 4 ( 2 1 α 2 − 1 ) v A = 6 − ( α + 1 ) 2 v A
上記の範囲で α \alpha α V A V_\text{A} V A
3 − 2 2 v A < V A < 2 v A
\sqrt{3 - 2 \sqrt{2}} v_\text{A} < V_\text{A} < 2 v_\text{A}
3 − 2 2 v A < V A < 2 v A
したがって,K A K_\text{A} K A
3 − 2 2 2 m v A 2 < K A < 2 m v A 2
\dfrac{3 - 2 \sqrt{2}}{2} m v_\text{A}^2 < K_\text{A} < 2 m v_\text{A}^2
2 3 − 2 2 m v A 2 < K A < 2 m v A 2
以上を合わせて,求める K A K_\text{A} K A
3 − 2 2 2 m v A 2 < K A < 2 m v A 2 , 5 2 m v A 2 < K A < 3 m v A 2
\dfrac{3 - 2 \sqrt{2}}{2} m v_\text{A}^2 < K_\text{A} < 2 m v_\text{A}^2 , \, \dfrac{5}{2} m v_\text{A}^2 < K_{\text{A}} < 3 m v_\text{A}^2
2 3 − 2 2 m v A 2 < K A < 2 m v A 2 , 2 5 m v A 2 < K A < 3 m v A 2
となります。
(3)(2)の結果を用いて考えてみます。x x x m v A 2 m v_\text{A}^2 m v A 2 3 − 2 2 2 < 1 \dfrac{3 - 2 \sqrt{2}}{2} < 1 2 3 − 2 2 < 1 θ 0 = π \theta_0 = \pi θ 0 = π 5 − 1 < α < 2 \sqrt{5} -1 < \alpha < \sqrt{2} 5 − 1 < α < 2
x 0 = 1 2 α 2 L x_0 = \dfrac{1}{2} \alpha^2 L x 0 = 2 1 α 2 L x 0 x_0 x 0 L L L m v A 2 m v_\text{A}^2 m v A 2
検出器全体で考えても,分裂の位置について同様に考えられるので,分裂の位置 x 0 x_0 x 0 L L L m v A 2 m v_\text{A}^2 m v A 2 と考えられます。
L v A \dfrac{L}{v_\text{A}} v A L L L L 減期 T T T L v A \dfrac{L}{v_\text{A}} v A L L L L と考えられます。
以上より,X の注入を繰り返し,A を検出したとき,運動エネルギーが m v A 2 m v_\text{A}^2 m v A 2 X の半減期 T T T L / v A L / v_\text{A} L / v A の方が,はるかに短い場合より多くなると期待されます。
蓋を開けてみれば力学の問題です。計算がやや煩雑になる箇所もありますが,方針は非常にシンプルです。