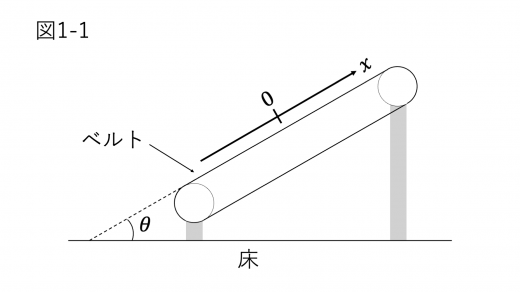
ベルトのなす斜面に沿った x 軸を斜面上向きが正となるようにとる。x 軸は常に床に対して静止している。このベルト上の物体の運動を考える。物体 A の質量は m である。また,ベルトと物体 A との間の静止摩擦係数は μ,動摩擦係数は μ′ である。物体は x 軸方向にのみ運動し,回転しないものとする。特に断りのない限り,物体の座標や速度はこの x 軸に対して定義する。重力加速度を g とし,物体の大きさや空気抵抗は無視してよい。
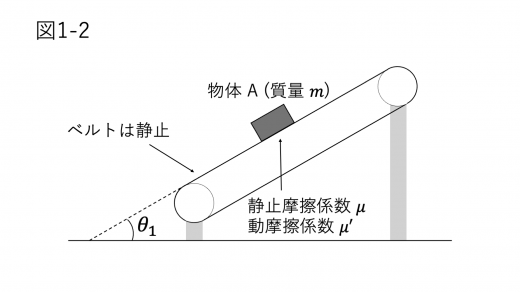
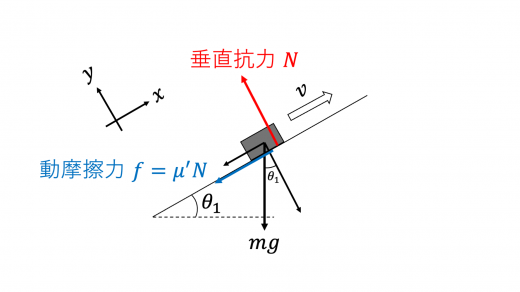
I はじめに図1-2のように,θ=θ1 とし,ベルトが静止しているときの物体 A の運動を考える。
x=0 において物体 A に初速度 v0(v0>0) を与えたところ,物体 A は斜面に沿って上昇したあと,再び x=0 に戻った。
(1)物体 A が最高点に到達したときの x 座標を求めよ。
(2)物体 A が x=0 に戻ったときの速度を μ′,v0,θ1,m,g のうち必要なものを用いて表せ。
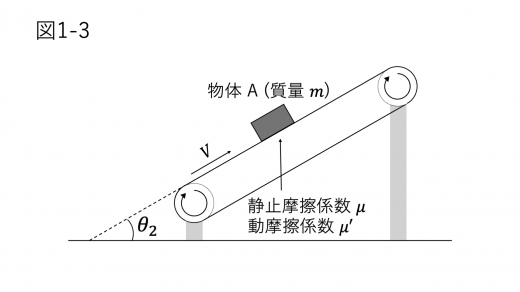
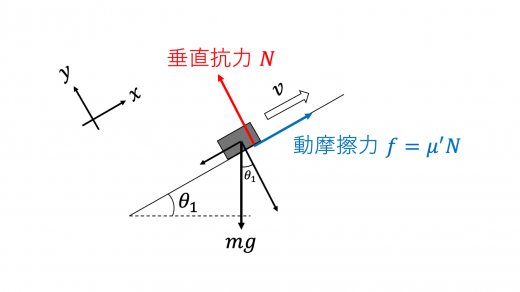
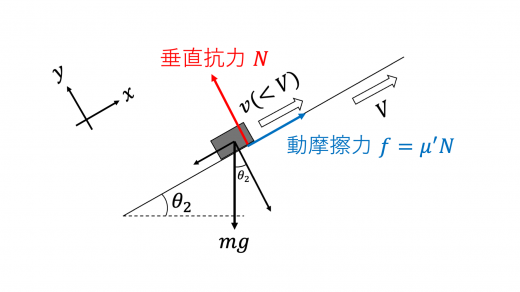
II 次に,図1-3のように θ=θ2 とし,一定の速度 V(V>0) でベルトが動いているときの物体 A の運動を考える。
(1)時刻 t=0 に物体 A を初速度 0 でベルトにおいたところ,物体 A は斜面上向きに移動し始めた。物体 A の速度を時刻 t(t>0) の関数として表せ。
(2)x=0 において物体 A に初速度 −v0(0<v0<V) を与えたところ,物体 A は斜面に沿って下降したあと,再び x=0 に戻った。物体 A が x=0 に戻ったときの速度を求めよ。
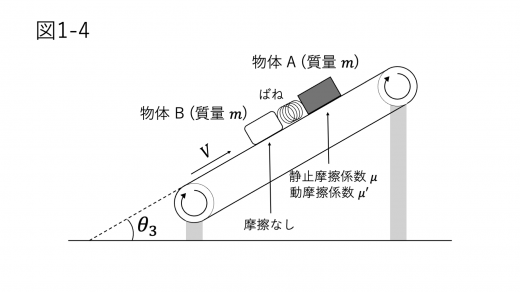
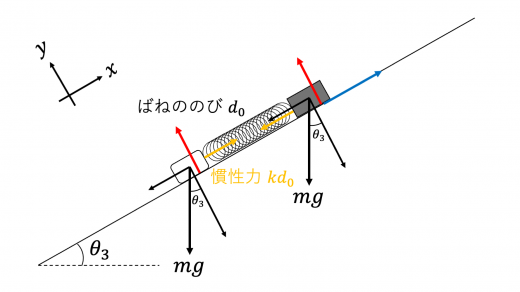
III 図1-4のように θ=θ3 とし,ばね定数 k のばねでつながれた物体 A と物体 B をベルト上におく。
物体 A は物体 B より常に高い位置にある。ベルトは一定の速度 V(V>0) で動いている。物体 B の質量は m で,物体 B とベルトとの間に摩擦はない。ばねは均質であり,ばねの質量は無視できる。
ばねを自然長から長さ d0 だけ伸ばした状態で,物体 A および B を速度 0 でベルトにおいたところ,二つの物体は x 軸に対して静止し続けた。
(1) d0 を V,θ3,m,g,k のうち必要なものを用いて表せ。
(2)μ′ を V,θ3,m,g,k にうち必要なものを用いて表せ。
次に物体 B の速度を 0 から V に瞬間的に変えた。この時刻を t=0 とする。物体 A は時刻 t1(t1>0) にはじめてベルトと同じ速度になった。物体 A および物体 B の速度をそれぞれ vA および vB とする。
(3)時刻 t(0<t<t1) における物体 A と物体 B の重心 G の速度 v=2vA+vB を t,V,θ3,m,g,k のうち必要なものを用いて表せ。
(4)時刻 t(0<t<t1) における物体 A および物体 B の運動は,重心 G から見るとそれぞれ単振動と見なせる。このことを用いて 0<t<t1 における vB および t1 を,それぞれ t,V,θ3,m,g,k を用いて表せ。ここで,重心 G から物体 A および物体 B までの距離がともに d だけ減少すると,物体 A がばねから受ける力は 2kd 変化することを用いてもよい。
よって,斜面を下降してから x=0 に戻るまでの運動は常に (☆) 式で記述されることがわかります。求める速度 v は t=T のときの速度であり
v=aT−v0=aa2v0−v0=v0
となります。
III
(1)物体 A および B は速度 0 で x 軸に対して静止しており,物体 A には x 軸正の方向に動摩擦力がはたらくことに注意してください。
物体 B に対して x 軸方向の力のつりあいより
kd0=mgsinθ3
∴d0=kmgsinθ3
(2)物体 Aに対して x,y 軸方向の力のつりあいより
{x:μ′N=mgsinθ3+kd0=2mgsinθ3y:N=mgcosθ3
これらより μ′ について解いて
μ′=N2mgsinθ3=2tanθ3
(3)物体 A,B およびばねの系の運動を考えます。時刻 0<t<t1 では物体 A には x 軸正の方向に動摩擦力がはたらきます。
物体 A,B およびばねの系での x 軸方向の運動方程式より
2ma=μ′NA−2mgsinθ3=2NAtanθ3−2mgsinθ3
∴ma=NAtanθ3−mgsinθ3
物体 A の y 軸方向の力のつりあいより
NA=mgcosθ3
したがって
ma=mgcosθ3tanθ3−mgsinθ3=mgsinθ3−mgsinθ3=0
∴a=0
したがって,物体 A,B およびばねの系の重心 G は初速度のまま等速直線運動を行います。したがって時刻 0<t<t1 での重心 G の速度 vG は
vG=2vA+vB=2V
となります。
(4)重心 G から見た物体 A,B の運動は単振動となることを用います。ここで,G から見た A および B の初速度はそれぞれ −V/2,V/2 であり,質量も等しいため,G から見た A および B の変位は逆方向で絶対値は同じであることがわかります。G から見た B の変位を xB~ とすると,B の運動方程式は
mxB~¨=−2kxB~−mgsinθ3=−2k(xB~+2kmgsinθ3)
よって,G から見た B の運動は,−21d0=−2kmgsinθ3 を中心とした ω2=m2k の単振動をすることがわかります。
G から見た B の速度 xB~ および位置 vB~ は
xB~=Asinωt−21d0,vB~=Aωcosωt
初期条件は,時刻 t=0 で vB~=2V より
Aω=2V∴A=21ωV
よって,静止系から見たときの時刻 0<t<t1 における B の速度 vB は
vB=vB~+vG=2V(1+cosm2kt)
と求められます。
また,G から見た A の速度 xA~ および位置 vA~ は
xA~=−xB~=−Asinωt+21d0,vA~=−2Vcosωt
静止系から見た A の速度 vA は
vA=vA~+vG=2V(1−cosωt)
時刻 t=t1 で vA=V となるので
cosωt1=−1∴ωt1=π
これより
t1=ωπ=π2km
と求められます。
(5)A およびばねは時刻 t>t1 で常にベルトと同じ速度 V で動きます。これらの系から見た B の運動はやはり単振動となります。このとき A およびばねの系から見た B の変位が d だけ変化すると,B がばねから受ける力は kd だけ変化します。
ここで,A およびばねの系から見た B の単振動の中心と振幅を考えます。この系で B に対する運動方程式より